BIOROBOTICS LABORATORY
SEOUL NATIONAL UNIVERSITY

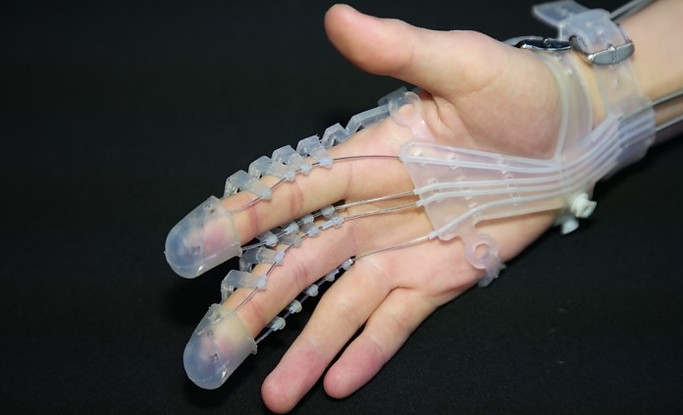
Soft Robotic Glove for the disabled people
Goal
To develop a soft wearable robot for the hand that helps people with spinal cord injury for assisting daily life.
Approach
Recently, due to advances in modern medicine, the number of individuals with spinal cord injuries (SCI), strokes, cerebral palsy and other disabilities is rapidly increasing. For these people, mobility and hand functionality are the two most important criteria for an independent life. In response, many research groups and companies are focusing on the development of robots related to these criteria. Currently, the mobility of people who have lost their ability to walk can regain some of their freedom through wheelchairs, however wheelchairs are no substitute to the freedom of walking. Consequently, there has been a large movement growing in the medical and engineering field to satisfy their desire to walk again.
Sadly though, there are no current commercialized robots or substitutions that fully satisfy the desire of functioning hands. Existing solutions mitigate these challenges through caregivers, whom help disabled individuals 24 hours a day, due to their inability to perform activities of daily living. Aside of the social issues surrounding the shortage of caregivers, having a caregiver cannot fully satisfy their desire for full independence. Disabled want to regain the ability to complete the basic tasks of eating by themselves, drinking by themselves, and opening a door by themselves.
Current Status
Exo-Glove Poly is a polymer based soft wearable robot for the hand that enables people who lost their hand function to grasp various objects with their hand. Exo-Glove Poly is built using polymer for comfort of the user and easy sanitization. Exo-Glove Poly is composed of wearable part and actuation unit. Design features to allow adjustment to different hand sizes and to protect users from injury were implemented. By restoring the hand function with this assistive technology, we hope that more people with disability will be able to live a better independent life.
Keywords : #Assistive, #Rehabilitation, #Hand glove
Related papers and patents
-

Ph.D. / Alumini
Brian Byunghyun Kang
· E-mail : brianbkang at snu.ac.kr
· Research Topic : Soft wearable robots

Ph.D. / Alumini
Byungchul Kim
· E-mail : brianbkang at snu.ac.kr
· Research Topic : Soft wearable robots

Ph.D. Candidate
Hyung-Min Choi
· E-mail : tndhals at gmail.com
· Research Topic : Soft wearable robots


Actuators for Tendon-Driven Soft Wearable Robots
Goal
To develop a soft wearable robot for the hand that helps people with spinal cord injury for assisting daily life.
Approach
Recently, due to advances in modern medicine, the number of individuals with spinal cord injuries (SCI), strokes, cerebral palsy and other disabilities is rapidly increasing. For these people, mobility and hand functionality are the two most important criteria for an independent life. In response, many research groups and companies are focusing on the development of robots related to these criteria. Currently, the mobility of people who have lost their ability to walk can regain some of their freedom through wheelchairs, however wheelchairs are no substitute to the freedom of walking. Consequently, there has been a large movement growing in the medical and engineering field to satisfy their desire to walk again.
Sadly though, there are no current commercialized robots or substitutions that fully satisfy the desire of functioning hands. Existing solutions mitigate these challenges through caregivers, whom help disabled individuals 24 hours a day, due to their inability to perform activities of daily living. Aside of the social issues surrounding the shortage of caregivers, having a caregiver cannot fully satisfy their desire for full independence. Disabled want to regain the ability to complete the basic tasks of eating by themselves, drinking by themselves, and opening a door by themselves.
Current Status
Exo-Glove Poly is a polymer based soft wearable robot for the hand that enables people who lost their hand function to grasp various objects with their hand. Exo-Glove Poly is built using polymer for comfort of the user and easy sanitization. Exo-Glove Poly is composed of wearable part and actuation unit. Design features to allow adjustment to different hand sizes and to protect users from injury were implemented. By restoring the hand function with this assistive technology, we hope that more people with disability will be able to live a better independent life.
Keywords : #Assistive, #Rehabilitation, #Hand glove
Related papers and patents
-
Ph.D. Candidate
Byungchul Kim
· E-mail : haemin1991 at naver.com
· Research Topic : Soft wearable robots, Prosthetic hands



Ph.D. Candidate
Hae-Min Lee
· E-mail : haemin1991 at naver.com
· Research Topic : Soft wearable robots, Prosthetic hands
Ph.D. / Alumini
Brian Byunghyun Kang
· E-mail : brianbkang at snu.ac.kr
· Research Topic : Soft wearable robots
Intention Detection Methodology for Wearable Robots
Goal
To develop a soft wearable robot for the hand that helps people with spinal cord injury for assisting daily life.
Approach
Recently, due to advances in modern medicine, the number of individuals with spinal cord injuries (SCI), strokes, cerebral palsy and other disabilities is rapidly increasing. For these people, mobility and hand functionality are the two most important criteria for an independent life. In response, many research groups and companies are focusing on the development of robots related to these criteria. Currently, the mobility of people who have lost their ability to walk can regain some of their freedom through wheelchairs, however wheelchairs are no substitute to the freedom of walking. Consequently, there has been a large movement growing in the medical and engineering field to satisfy their desire to walk again.
Sadly though, there are no current commercialized robots or substitutions that fully satisfy the desire of functioning hands. Existing solutions mitigate these challenges through caregivers, whom help disabled individuals 24 hours a day, due to their inability to perform activities of daily living. Aside of the social issues surrounding the shortage of caregivers, having a caregiver cannot fully satisfy their desire for full independence. Disabled want to regain the ability to complete the basic tasks of eating by themselves, drinking by themselves, and opening a door by themselves.
Current Status
Exo-Glove Poly is a polymer based soft wearable robot for the hand that enables people who lost their hand function to grasp various objects with their hand. Exo-Glove Poly is built using polymer for comfort of the user and easy sanitization. Exo-Glove Poly is composed of wearable part and actuation unit. Design features to allow adjustment to different hand sizes and to protect users from injury were implemented. By restoring the hand function with this assistive technology, we hope that more people with disability will be able to live a better independent life.
Keywords : #Assistive, #Rehabilitation, #Hand glove
Related papers and patents
-
Ph.D. / Alumini
Brian Byunghyun Kang
· E-mail : brianbkang at snu.ac.kr
· Research Topic : Soft wearable robots

Upper Limb Soft Wearable Robot
Goal
To develop a soft wearable robot for the hand that helps people with spinal cord injury for assisting daily life.
Approach
Recently, due to advances in modern medicine, the number of individuals with spinal cord injuries (SCI), strokes, cerebral palsy and other disabilities is rapidly increasing. For these people, mobility and hand functionality are the two most important criteria for an independent life. In response, many research groups and companies are focusing on the development of robots related to these criteria. Currently, the mobility of people who have lost their ability to walk can regain some of their freedom through wheelchairs, however wheelchairs are no substitute to the freedom of walking. Consequently, there has been a large movement growing in the medical and engineering field to satisfy their desire to walk again.
Sadly though, there are no current commercialized robots or substitutions that fully satisfy the desire of functioning hands. Existing solutions mitigate these challenges through caregivers, whom help disabled individuals 24 hours a day, due to their inability to perform activities of daily living. Aside of the social issues surrounding the shortage of caregivers, having a caregiver cannot fully satisfy their desire for full independence. Disabled want to regain the ability to complete the basic tasks of eating by themselves, drinking by themselves, and opening a door by themselves.
Current Status
Exo-Glove Poly is a polymer based soft wearable robot for the hand that enables people who lost their hand function to grasp various objects with their hand. Exo-Glove Poly is built using polymer for comfort of the user and easy sanitization. Exo-Glove Poly is composed of wearable part and actuation unit. Design features to allow adjustment to different hand sizes and to protect users from injury were implemented. By restoring the hand function with this assistive technology, we hope that more people with disability will be able to live a better independent life.
Keywords : #Assistive, #Rehabilitation, #Hand glove
Related papers and patents
-
Ph.D. / Alumini
Brian Byunghyun Kang
· E-mail : brianbkang at snu.ac.kr
· Research Topic : Soft wearable robots