BIOROBOTICS LABORATORY
SEOUL NATIONAL UNIVERSITY

Wearables & Prosthetics




We design soft wearable robots and prosthetic hands for all individuals in need of assistance, rehabilitation, sports augmentation, or injury prevention. Our goal is to enhance the independence of everyone, enabling them to not only perform daily life tasks, but also to sing, and to participate in sports like golf and tennis. We design simple but effective mechanisms and control systems by drawing inspiration from nature and human biomechanics. We also strive for safer and more comfortable interactions between robots and humans, both in terms of physical interaction and non-physical intention-based communication.
Polymer-based Tendon-driven Soft Wearable Robot for the hand for spinal cord injury patients
Recently, due to advances in modern medicine, the number of individuals with spinal cord injuries (SCI), strokes, cerebral palsy and other disabilities is rapidly increasing. For these people, mobility and hand functionality are the two most important criteria for an independent life. In response, many research groups and companies are focusing on the development of robots related to these criteria. Currently, the mobility of people who have lost their ability to walk can regain some of their freedom through wheelchairs, however wheelchairs are no substitute to the freedom of walking. Consequently, there has been a large movement growing in the medical and engineering field to satisfy their desire to walk again.
Sadly though, there are no current commercialized robots or substitutions that fully satisfy the desire of functioning hands. Existing solutions mitigate these challenges through caregivers, whom help disabled individuals 24 hours a day, due to their inability to perform activities of daily living. Aside of the social issues surrounding the shortage of caregivers, having a caregiver cannot fully satisfy their desire for full independence. Disabled want to regain the ability to complete the basic tasks of eating by themselves, drinking by themselves, and opening a door by themselves.
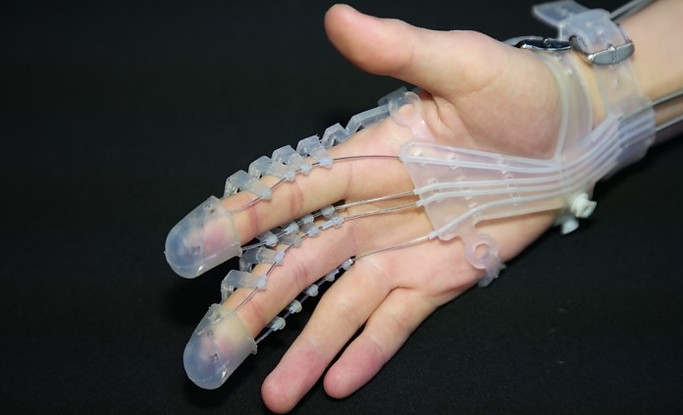
Exo-Glove Poly is a polymer based soft wearable robot for the hand that enables people who lost their hand function to grasp various objects with their hand. Exo-Glove Poly is built using polymer for comfort of the user and easy sanitization. Exo-Glove Poly is composed of wearable part and actuation unit. Design features to allow adjustment to different hand sizes and to protect users from injury were implemented. By restoring the hand function with this assistive technology, we hope that more people with disability will be able to live a better independent life.
Keywords : #Assistive, #Rehabilitation, #Hand glove
Related papers and patents
Kang, B. B., Choi, H., Lee, H., & Cho, K. J. (2019). Exo-glove poly II: A polymer-based soft wearable robot for the hand with a tendon-driven actuation system. Soft robotics, 6(2), 214-227.

Ph.D. / Alumni
Brian Byunghyun Kang
· E-mail : brianbkang@snu.ac.kr
· Research Topic : Soft wearable robots

Ph.D. Candidate
Hyungmin Choi
· E-mail : tndhals at gmail.com
· Research Topic : Wearable robots



Ph.D. / Alumni
Haemin Lee
· E-mail : haemin1991@naver.com
· Research Topic : Soft wearable robots, Prosthetic hand design, 3D printable mechanisms
Actuators for soft wearable tendon-driven robots
Tendon-driven actuators are integral to the design of soft wearable robots, yet they face several challenges. Traditional systems often require the tendon to maintain constant tension to avoid derailment, leading to high friction forces, especially in the absence of ball bearings. This tension can cause derailment due to the non-linear kinematics of soft robots and pose safety issues in wearable applications. Moreover, traditional linear actuators, like ball screws, become impractical in small-scale applications due to their size requirements to accommodate the tendon excursion length. These challenges highlight the need for innovative solutions in tendon-driven actuator design for soft wearable robots.
A novel solution, the slack-enabling tendon drive, addresses these issues by employing a spool mechanism with a one-way clutch, allowing the system to maintain tension around the spool regardless of the tendon condition at the end-effector. This design eliminates the need for continuous tendon tension, thereby reducing friction and improving safety. The slack-enabling mechanism, optimized for force control, increases both the durability and efficiency of the actuator. Furthermore, the space efficiency of the spool renders this actuator smaller than traditional linear actuators. This mechanism has been successfully applied to Exo-Glove, a soft wearable robotic hand, demonstrating its practicality and effectiveness in enhancing the performance of soft wearable robots.
The slider-tendon linear actuator represents another significant advancement. It uses a tendon-driven slider to decouple the tendon into a motor tendon and an end-effector tendon. This design significantly reduces the actuator size while ensuring reliability and durability, addressing the limitations of both ball screw and slack-enabling actuators. Key features of this actuator include under-actuation mechanisms for adaptability, fast-connection for ease of maintenance, and stroke amplification to maintain compact size while achieving longer wire strokes. These features collectively enhance the maintenance efficiency, operability, and portability of wearable robots, proving the slider-tendon linear actuator's ability to meet the stringent requirements of soft wearable robotics
Keywords : #Tendon-driven, #Actuator, #Slack

Related papers and patents
In, H., Jeong, U., Lee, H., & Cho, K. J. (2016). A novel slack-enabling tendon drive that improves efficiency, size, and safety in soft wearable robots. IEEE/ASME Transactions on Mechatronics, 22(1), 59-70.
Kim, B., Jeong, U., Kang, B. B., & Cho, K. J. (2021). Slider-tendon linear actuator with under-actuation and fast-connection for soft wearable robots. IEEE/ASME Transactions on Mechatronics, 26(6), 2932-2943.



Ph.D. / Alumni
Haemin Lee
· E-mail : haemin1991@naver.com
· Research Topic : Soft wearable robots, Prosthetic hand design, 3D printable mechanisms



Intention detection methods for robotic glove
The development of soft robotic gloves, aimed at aiding individuals with mobility impairments such as quadriplegia, has seen significant advancements in intention detection methodologies. While traditional methods relying on biosignal and mechanical sensors required extensive calibration and struggled with accurately interpreting user intentions, recent innovations have shifted towards more intuitive solutions. One such breakthrough is the implementation of learning-based methodologies using first-person-view cameras. These methods intuit user intentions for wearable hand robots without the need for personal calibration, allowing for a more seamless and adaptive interaction between users and robotic devices.
The introduction of VIDEO-Net marks a significant progression in intention detection, particularly for spinal cord injury (SCI) patients. VIDEO-Net employs a machine learning model that integrates spatial and temporal information to infer user intentions. This model leverages the spatial relationship between the hand and the target object, and the temporal history of user’s arm behaviors, to create a more accurate and intuitive system. Unlike previous methods that required intense, person-specific calibrations, VIDEO-Net detects user intentions through visual cues, eliminating the need for additional user actions or biosignal interpretation. This approach represents a substantial improvement in facilitating natural and efficient interaction between SCI patients and robotic gloves.
In contrast to the conventional multi-sensor EMG interfaces, a novel single EMG sensor-driven robotic glove has been developed, offering a more reliable and streamlined solution. This innovative approach uses a single sensor placed on the musculotendinous junctions (MTJs) of the flexor digitorum superficialis (FDS) to identify power grasp intentions. The myoelectric signals from the MTJs show increased amplitudes specifically during power grasps, allowing for precise control regardless of arm posture. This method surpasses traditional multi-sensor systems in reliability and simplicity, effectively addressing the challenges of signal interference and sensor placement. Additionally, it enhances safety in high-force applications by robustly distinguishing intended power grasps from other movements.
Keywords : #Intetion detection, #Vision, #EMG

Related papers and patents
Kim, D., Kang, B. B., Kim, K. B., Choi, H., Ha, J., Cho, K. J., & Jo, S. (2019). Eyes are faster than hands: A soft wearable robot learns user intention from the egocentric view. Science Robotics, 4(26), eaav2949.
Cheon, S., Kim, D., Kim, S., Kang, B. B., Lee, J., Gong, H., ... & Ahn, J. (2020). Single EMG sensor-driven robotic glove control for reliable augmentation of power grasping. IEEE Transactions on Medical Robotics and Bionics, 3(1), 179-189.

Ph. D. / Alumni
Brain Byunghyun Kang
· E-mail : tndhals at gmail.com
· Research Topic : Wearable robots
Wrist wearable robots for the disabled people
Developing wearable robots for assisting wrist movements in stroke patients poses significant challenges. Traditional devices often struggle with adaptability and comfort, particularly for long-term use in daily activities. These challenges are compounded by the need for devices that can accommodate the diverse range of wrist movements necessary for activities of daily living (ADLs). Many existing wrist-assistive devices are either too rigid or bulky, limiting their practicality and reducing patient compliance. This creates a demand for more sophisticated, user-friendly solutions that can effectively support the wrist in a natural and comfortable manner.
The Exo-Wrist represents a significant advancement in wrist-assistive technology for stroke patients. As a soft tendon-driven wrist-wearable robot, it specifically supports the dart-throwing motion (DTM), a critical movement in wrist extension and ADLs. The device features an innovative active forearm anchor which applies compression only when needed, thus avoiding long-term pressure and discomfort. This anchor utilizes a corset-based moving pulley mechanism actuated by a tendon for efficient force transmission. The Exo-Wrist is designed to be portable, compact, and lightweight, making it suitable for continuous use in various daily settings. Its compatibility with other wearable robots, like hand-assist gloves, further enhances its functionality, providing comprehensive support for patients with wrist impairments. By focusing on natural wrist movement and user comfort, the Exo-Wrist emerges as a promising tool in the realm of wearable robotics for rehabilitation and daily assistance.
Keywords : #Assistive, #Rehabilitation, #Wrist, #Soft Wearable Robots

Related papers and patents
Choi, H., Kang, B. B., Jung, B. K., & Cho, K. J. (2019). Exo-wrist: A soft tendon-driven wrist-wearable robot with active anchor for dart-throwing motion in hemiplegic patients. IEEE Robotics and Automation Letters, 4(4), 4499-4506.
Movement Reshaping Suit for lift assistance
The movement patterns appropriate for exercise and manual labor do not always correspond to what people instinctively choose for better comfort. Without expert guidance, people can even increase the risk of injury by choosing a comfortable posture rather than the appropriate one, notably when lifting objects. Even in situations where squatting is accepted as a desirable lifting strategy, people tend to choose the more comfortable strategy of stooping or semisquatting. The common approach to correcting lifting posture, immobilizing vulnerable joints via fixation, is insufficient for preventing back injuries sustained from repetitive lifting. Instead, when lifting small but heavy objects, the entire kinetic chain should cooperate to achieve a series of squat-lifting patterns. Inspired by the observation that force fields affect the coordination of voluntary human motion, we devised a passive exosuit embedded with a body-powered variable-impedance mechanism. The exosuit adds impedance to the human joints according to how far the wearer’s movement is from the squat-lifting trajectories so that it hinders stooping but facilitates squatting. In an experiment that entailed lifting a small 10-kg box, 10 first-time users changed their voluntary lifting motion closer to squatting on average. Simulation results based on recorded kinematic and kinetic data showed that this postural change reduced the compression force, shear force, and moment on the lumbosacral joint. Our work demonstrates the potential of using an exosuit to help people move in a desirable manner without requiring a complicated, bulky mechanical system.
Keywords: #Body-powered, #Variable impedance, #Exosuit, #MR suit

Related papers and patents
-
Sung-Sik Yun, Keewon Kim, Jooeun Ahn, and Kyu-Jin Cho, "Body-powered variable impedance: An approach to augmenting humans with a passive device by reshaping lifting posture," Science Robotics, 2021.
-
Kyu-Jin Cho, and Sung-Sik Yun, "Body Powered Wearable Variable Impedance Device", 10-2197331, Dec. 24, 2020.
-
Kyu-Jin Cho, and Sung-Sik Yun, "Wearable device using flexible non-powered variable impedance mechanism", US20220008776A1, Jan. 2022, US

Ph.D.
Sung-Sik Yun
· E-mail : yss1215 at snu.ac.kr
· Research Topic : Soft wearable robots & Assistive/ Rehabilitation robots
Arm Back Support Suit (Abs-suit) for Parcel Delivery
A significant part of the parcel delivery service occurs outside the warehouse, relying entirely on human resources to deliver parcels to the customer’s doorstep. The parcel delivery officers carry and hold parcels of about 25 kg of weight during the delivery process through diverse terrains such as elevated ground and staircases especially in many crowded cities. As a result of holding and carrying heavy parcels repeatedly, the officers report upper body musculoskeletal disorders in the arms, and lower back. Robotic exosuits are actively being developed but are primarily oriented toward lifting assistance only and do not cater to the entire upper body assistance. In this paper, we propose a load-redistribution strategy in the form of a fully soft passive wearable robot, that provides load-dependent compression around the lower back for back support and arm assistance. This is achieved through the coupling of the load and the human body, which ensures the wearer receives appropriate assistance only when in need. The suit design parameters are as follows: the elastic component that inherently enhances comfort in breathing even in its tightened state while transmitting compression force onto the human abdominal muscles; and the number of pulleys on the belt to control the amount of belt compression in users of different size; and the length of the corset tendon. The mannequin mock-up experiment and analytical modeling demonstrate the relationship between the design parameters and pressure on the human body. Human experiment also verifies the upper body assistance performance of the suit in significantly reducing the arms' muscle efforts (p < 0.05) in parcel delivery.
Keywords: #Soft robot, #Assistive, #Passive, #Load redistribution mechanism

Related papers and patents
-
Hye Ju Yoo, Jewoo Lee, and Kyu-Jin Cho, "Arm Back Support Suit (Abs-Suit) for Parcel Delivery with a Passive Load Redistribution Mechanism," IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1238-1245, Feb. 2024, doi: 10.1109/LRA.2023.3340511.

Ph.D. Candidate
Hye Ju Yoo
· E-mail : hyoo1@snu.ac.kr
· Research Topic : Wearable robots, Biomedical robotics, Soft actuators

M.S. / Alumni
Jewoo Lee
· E-mail : jwlee2218@snu.ac.kr
· Research Topic : Wearable robots, Rehabilitation robotics
· Affiliation: WIRobotics
Knee Unloading System
Soft robotic wearables have emerged as an ergonomic alternative to rigid robotic wearables, commonly utilizing tension-based actuation systems. However, their soft structure's natural tendency to buckle limits their use for compression bearing applications. This study presents reinforced flexible shell (RFS) anchoring, a compliant, low-profile, ergonomic wearable platform capable of high compression resistance. RFS anchors are fabricated with soft and semirigid materials that typically buckle under compressive loads. Buckling is overcome using the wearer's leg as a support structure, reinforcing the shells with straps, and minimizing the space between the shells and the wearer's skin—enabling force transmission orders of magnitude larger. RFS anchoring performance was evaluated comparatively by examining the shift-deformation profiles of three identically designed braces fabricated with different materials: rigid, strapped RFS, and unstrapped RFS. The unstrapped RFS severely deformed before 200 N of force could be applied. The strapped RFS successfully supported 200 N of force and exhibited a nearly identical transient shift-deformation profile with the rigid brace condition. RFS anchoring technology was applied to a compression-resistant hybrid exosuit, Exo-Unloader, for knee osteoarthritis. Exo-Unloader utilizes a tendon-driven linear sliding actuation system that unloads the medial and lateral compartments of the knee. Exo-Unloader can deliver 200 N of unloading force without deforming, as indicted by its similar transient shift-deformation profile with a rigid unloader baseline. Although rigid braces effectively withstand and transmit high compressive loads, they lack compliance; RFS anchoring technology expands the application of soft and flexible materials to compression-based wearable assistive systems.
Keywords: #Knee, #Assistive, #Unloading, #Anchoring

Related papers and patents
-
Sung-Sik Yun, Christian William Bundschu, and Kyu-Jin Cho, "A Hybrid Anchoring Technology Composed of Reinforced Flexible Shells for a Knee Unloading Exosuit," Soft Robotics, 2023.
-
Kyu-Jin Cho, Sung-Sik Yun, and Christian William Bundschu, "Wearable Anchoring Device", WO2022050442A1, Mar. 2020, PCT
-
Kyu-Jin Cho, Sung-Sik Yun, and Christian William Bundschu, "Wearable Anchoring Device", 10-2604037, Nov. 15, 2023.
-
Kyu-Jin Cho, Sung-Sik Yun, and Christian William Bundschu, "Wearable Knee Unloading Device", 10-2608141, Nov. 27, 2023.
Ph.D.
Sung-Sik Yun
· E-mail : yss1215 at snu.ac.kr
· Research Topic : Soft wearable robots & Assistive/ Rehabilitation robots

Ph.D.
Christian W. Bundschu
· E-mail : schubs at snu.ac.kr
· Research Topic : Soft wearable robots, lower limb orthopedic rehabilitation
Exo-Abs: A Wearable Robotic System for Noninvasive and Effort-Synchronized Respiratory Assistance
Existing technologies for patients with respiratory insufficiency have focused on providing reliable assistance in their breathing. However, the need for assistance in other everyday respiratory functions, such as coughing and speaking, has remained unmet in these patients. Here, we propose Exo-Abs, a wearable robotic system that can universally assist wide-ranging respiratory functions by applying compensatory force to a user’s abdomen in synchronization with their air usage. Inspired by how human abdominal muscles transmit pressure to the lungs via abdominal cavity compression, a biomechanically interactive platform was developed to optimally utilize the abdominal compression while aligning the assistance with a user’s spontaneous respiratory effort. In addition to the compact form factor, thorough analytic procedures are described as initial steps toward taking the human respiratory system into the scope of robotics technology. We demonstrate the validity of the overall human–system interaction with the assistance performance under three essential respiratory functions: breathing, coughing, and speaking. Our results show that the system can significantly improve the performance of all these functions by granting on-demand and self-reliant assistance to its users.
Keywords: #Assistive, #bio-inspired, #biomedical, #rehabilitation

Related papers and patents
-
Sang-Yoep Lee, Jin-Oh Hahn, Jaewon Beom, Ji-Hong Park, Han Eol Cho, Seong-Woong Kang, and Kyu-Jin Cho, "Exo-Abs: A Wearable Robotic System Inspired by Human Abdominal Muscles for Noninvasive and Effort-Synchronized Respiratory Assistance," IEEE Transactions on Robotics, vol. 38, no. 5, 2022.
-
S.-Y. Lee and K.-J. Cho, “A study on the cough augmentation using a belt-driven assistive robot,” in 2017 International Conference on Rehabilitation Robotics (ICORR), Jul. 2017, pp. 1654–1659, doi: 10.1109/ICORR.2017.8009485.
-
S.-Y. Lee and K.-J. Cho, “A preliminary study for evaluation of a belt-driven assistive robot applied to vocal amplification,” in 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC’17), Jul. 2017.
-
S.-Y. Lee, U. Jeong, and K.-J. Cho, “An application of user-friendly control for a Respiratory Rehabilitation and Assistance Robot,” in 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Jul. 2015, pp. 441–446, doi: 10.1109/AIM.2015.7222573.
-
K.-J. Cho, S.-Y. Lee, and M. G. Brown, “ACUPRESSURE DEVICE ASSISTING BREATH,” US10117805B2, Nov. 06, 2018.
-
K.-J. Cho, S.-Y. Lee, and M. G. Brown, “ACUPRESSURE DEVICE ASSISTING BREATH,” KR1020140037952A, Sep. 29, 2016.
Press

Ph.D. / Alumni
Sang-Yoep Lee
· E-mail : wsheaven@snu.ac.kr
· Research Topic : Robotics, bioengineering, rehabilitation
· Affiliation: Postdoc researcher at d'Arbeloff lab & TTDD lab, MIT
Single-sTep 3d Printed (ST3P) Hand
Single-step 3D printing, which can manufacture complicated designs without assembly, has the potential to
completely change our design perspective, and how 3D printing products, rather than printing static components,
ready-to-use movable mechanisms become a reality. Existing 3D printing solutions are challenged by
precision limitations, and cannot directly produce tightly mated moving surfaces. Therefore, joints must be
designed with a sufficient gap between the components, resulting in joints and other mechanisms with imprecise
motion. In this study, we propose a bio-inspired printable joint and apply it to a Single sTep 3D-printed
Prosthetic hand (ST3P hand). We simulate the anatomical structure of the human finger joint and implement a
cam effect that changed the distance between the contact surfaces through the elastic bending of the ligaments
as the joint flexed. This bio-inspired design allows the joint to be single-step 3D printed and provides precise
motion. The bio-inspired printable joint makes it possible for the ST3P hand to be designed as a lightweight
(*255 g), low-cost (*$500) monolithic structure with nine finger joints and manufactured via single-step 3D
printing. The ST3P hand takes *6 min to assemble, which is approximately one-tenth the assembly time of
open-source 3D printed prostheses. The hand can perform basic hand tasks of activities of daily living by
providing a pulling force of 48N and grasp strength of 20 N. The simple manufacturing of the ST3P hand could
help us take one step closer to realizing fully customized robotic prosthetic hands at low cost and effort.
Keywords: #single-step 3D printing, #bio-inspired joint, #prosthetic hand.

Related papers and patents
Lee, H., Park, J., Kang, B. B., & Cho, K. J. (2023). Single-Step 3D Printing of Bio-Inspired Printable Joints Applied to a Prosthetic Hand. 3D Printing and Additive Manufacturing, 10(5), 917-929.
Lee, H., Park, J., Kang, B. B., & Cho, K. J, "APPARATUS INCLUDING INTEGRAL JOINT CAPABLE OF OUTPUTTING BY 3D PRINTER" KR1022528710000, May 11th, 2021.
Ph.D. / Alumni
Haemin Lee
· E-mail : haemin1991@naver.com
· Research Topic : Soft wearable robots, Prosthetic hand design, 3D printable mechanisms

Ph.D. Candidate
JongHoo Park
· E-mail : jpark608@snu.ac.kr
· Research Topic : Prosthetic hand design, 3D/4D Printable mechanisms
Ph.D. / Alumni
Brian Byunghyun Kang
· E-mail : brianbkang@sejong.ac.kr
· Affiliation : Professor of Sejong University(세종대학교)
Anthropomorphic Prosthetic Hand for Golf Swing
Swinging-generating high impact by maximizing the speed of motion-is essential in sports activities. However, designing prosthetic hands suitable for swinging is still a challenge. Herein, we propose a swing-dedicated prosthetic hand that adopts the anatomical features of humans for an efficient swing. Our design, inspired by the joint arthrokinematics and tendon routing of fingers, enables a diagonal power “squeeze” grip robust to impact while increasing the reach of the clubhead. The swing speed is further increased by radio/ulnar deviation of the wrist and its nonlinear stiffness change achieved by the passive clutch mechanism. We evaluated our prosthetic hand through golf and found that it sustained high impact with diagonal grip, and clubhead speed increased by 19% at 90 r/min, with the radio/ulnar deviation nonlinearly correlated with arm angle. Our prosthetic hand design will contribute to improving amputees’ quality of life by allowing them to participate in sports activities.
Keywords: #prosthetic hand #bio-inspired #sports-activities

Related papers and patents
Chang, M. H., Kim, D. H., Kim, S. H., Lee, Y., Cho, S., Park, H. S., & Cho, K. J. (2021). Anthropomorphic prosthetic hand inspired by efficient swing mechanics for sports activities. IEEE/ASME Transactions on Mechatronics, 27(2), 1196-1207.
Chang, M. H., Kim, S. H & Cho, K. J, "Wire Driven Prosthetic Hand for Sports" KR1023891800000, April 18th, 2022.

Ph.D. Candidate
Mun-Hyuk Jang
· E-mail : munhyuk89@gmail.com
· Research Topic : Prosthetic hand design, Differential Mechanisms

Bio-inspired Robotic Hand
The human hand is such a complex and sophisticated tool compared to any other mechanical structure. In this research bioinspired aspects of the joints and tendon-driven mechanisms are studied to expand the coverage and improving the functionality of the prosthetic and the robotic hands.
Also, integrating tactile sensors into robotic applications is still a challenge because of sensor interconnection and various form factors. This study proposes an integrated design of a multi-joint robotic finger with magnetic synapse sensors inspired by the human’s joint structure and synapse system. The robotic fingers integrated with a high-sensitivity sensor array can grasp objects with various shapes and compliance (i.e., artificial flowers, paper cups, and wine glasses) without damaging the objects using tactile feedback.
Keywords : #Prosthetic hand, #Sports

Related papers and patents
S.-H. Kim, S. Oh, K. B. Kim, Y. Jung, H. Lim, and K.-J. Cho, "Design of a Bioinspired Robotic Hand: Magnetic Synapse Sensor Integration for a Robust Remote Tactile Sensing," in IEEE Robotics and Automation Letters, vol. 3, No. 4, 2018. [PDF]
S.-H. Kim, S.-S. Yun, and K.-J. Cho, "Artificial Ligament-Joint Design for a Bioinspired Hand," Engineering in Medicine and Biology Society (EMBC), 2017.
Sang-Hun Kim, and Kyu-Jin Cho, "Substitution Strategy of the Rolling Contact Joints Kinematics for the Robotic Applications", 2016 16th International Conference on Control, Automation and Systems (ICCAS 2016) Oct. 16-19, 2016 in HICO, Gyeongju, Korea. Best Presentation Award.
Sang-Hun Kim, Hyunki In, Jeong-Ryul Song, and Kyu-Jin Cho, "Force Characteristics of Rolling Contact Joint for Compact Structure," in IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2016, pp. 1207-1212.

Ph.D. / Alumni
Sang-Hun Kim
· E-mail : pine6710 at snu.ac.kr
· Research Topic : Bionic arm, Soft wearable robots